您现在的位置是:主页 > 模板分享 > 国外 >
使用雷达波传感器为家庭创建多人非接触式生命
发布时间:2025-05-10 10:57编辑:bat365在线平台官网浏览(102)
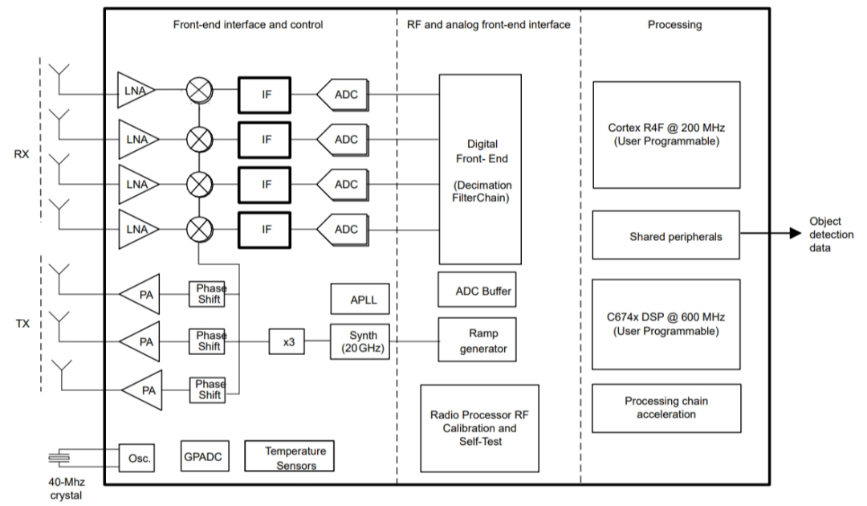 本文指出:简介人类的重要迹象通常是通过依靠与患者身体有线连接的历史监测系统来衡量的,以通过心电图和氧气饱和传感器的结合来报告心率和呼吸率。这些传感器很难与新生儿,严重烧伤,癫痫患者或精神病患者保持不断接触。对于那些自由移动的人,当他们搬到家中时,监视重要的迹象可能并不容易。雷达波(mmwave)传感器也可以检测到非常微妙的运动,即使患者的胸部增加。由于胸部运动受呼吸(初级频率)和心率运动(过度)的影响,因此胸部运动的精细测量可以实现生命体征的接触测量。导致此功能的主要贡献是传感器通过频率调节连续波的结合来检测患者的胸部和速度的能力(FMCW)发现和多输入多输出(MIMO)天线雷达系统。传感器还可以看到床上的运动,并为潜在的卧床提供护理人员,并且还可以同时监测许多患者,例如几个成年人。此外,毫米波传感器可以看到一个人的跌倒,并让看护人实时。集成的重要线性FM脉冲坡道线性度是确保FMCW系统中准确和经常测量的参数之一。将整个模拟链的整合到OneThe OneThe Minolithic Microwave整合电路中不仅减少了设计和设计之间的差异,而且还有助于改善整体 - 序列 - 测量,因为可以在衰老和温度的发生率下进行有效的监测和校准。查看图1中Texas Instruments(TI)IWR6843的框图,您可以看到“发射器接收器”部分中唯一的外部元素是标准的40MHz晶体。另外to此外部40MHz晶体,IWR6843还提供了发射机/收件人的完整集成:●坡道生成器。 ●小数的相锁环。 ●20GHz电压控制的振荡器(VCO)可以与许多前端同步,并实施相互关联的采样,以显着从外部(或从外部监狱中选择)饲养的更大的虚拟天线。 IWR6843还包含用于发射器和接收器的完整射频链(RF),包括:●软件可编程功率放大器,可在根据环境和RF法规调整链路预算时,允许多脚本传输强度,以提高灵活性。 ●用于光束控制的动态可编程相变。 ●低噪声放大器使用电源放大器编程时,可以安排链接预算。 ●可以通过发送和接收线性调制脉冲来生成中间频率(IF)的混合器。 ●如果模拟过滤器。 ●模数转换器(AD)c)采样频率高达25MHz。图1 IWR6843阻止了在芯片上MMIC系统中包含完整的RF链的图可以达到性能安全性所需的诊断能力水平。完整的数字信号链处理16位范围,多普勒或快速傅立叶变换(FFT)和信号处理中持续的不正确警报率(CFAR)。 ●600MHz完全编程的数字信号处理器,可以实现完全可自定义的信号处理。 ●完整的可编程200MHzARM®Cortex®-R4F微控制器用于聚类,监视和应用程序级代码。除了集成模具级别外,IWR6843 IWR6843AOP模型还包括包装中的天线,该天线允许进一步集成并减少印刷电路板(PCB)区域,以在空间或RF信号强迫的应用程序中具有挑战性情况。 FMCWFMCW提供了一种非常简单的调制方法,可提供广泛的范围和高精度测量距离时。 FMCW还提供了平均打孔器,并提供了径向尺寸的速度(雷达和目标之间的界限),这可能是高速(例如汽车速度)或低速(例如呼吸时胸部的胸部速度)。监测此类轻度作用通常称为多普勒检测或Microdoppler检测。线性FM脉冲线性FM脉冲描述了FMCW中使用的调制。随着时间的推移,即时频率F(T)随着时间的推移而变化,因此它是FM的线性脉冲。差异 - 发送线性调制脉冲和接收线性调制脉冲之间的频率与飞行时间成正比(达到目标和返回的时间),因此与到达目标的距离成正比。公式1表示广泛的交付为:其中k是交付时间交付频率的斜率(对于IWR6843,此数量可以是0MHz/µs和250MHz/µs之间的任何值,幅度(变速箱功率)信号的),F0是最低的频率(根据所选的VCO为57GHz或60GHz)。公式2表示接收的幅度为:其中,对于δ=(2×d) /v(飞行时间的两倍),d到目标的距离,v是介质中光传播的速度。混合器乘以发送信号和接收信号之间的频率差(公式3):根据三角函数的基本规则,混合器的输出是两个故障的总和:电影的频率是f_tx和f_rx之间的差异,另一个电影的总和是两个。混合器的输出通过低通滤波器恢复,其频率是发射器和接收者之间的频率差。方程4是在集成和差异的公式中,AS:混音器输出通过低通滤波器将使IF if,这是发射器和收件人之间的频率差异(因此,e量与飞行时间成正比)。方程5是结果信号:ADC是一个信号;请注意,信号频率低于线性频率调制脉冲的频率,因此很容易通过正常的ADC。例如,IWR6843中的最大ADC采样频率为25MHz。从等式5中,您可以清楚地看到用于测量呼吸频率多普勒元素的胸部运动的心率。当信号仅带有 - 点信息(YIF频率为飞行时间)时,FFT和峰值检测时,信号通过FFT的距离,然后执行CFAR或阈值算法的算法。图2显示了不同天线之间飞行的时间差。图2相增加了每个天线接收的MIMO描述,总结,到达角度来自每个接收天线测得的飞行时间。在数学级别上,等式6将每个天线的方向盘定义为:转向矢量用于将每个目标的信号与每个天线组合。公式7表示所有天线从每个目标发送的所有信号的总和,其中xi是3天线接收的信号:方程8计算基于窄的零件计算算法。 The algorithm can increase the output strength of the beamformer in connection with a particular direction to a greater extent, expressing a maximizing relationship with Equation 9 as: To calculate the P (A (θ)) of each θ, Equation 10 is approximately R As: where X is the signal matrix (Equation 11): From this formula Radar implements the position of derivation in three dimensions.光束控制沿您希望看到带有雷达传感器的捕获场景数据的方向通常需要在天线宽度提供的整个视野的每个帧周期中进行扫描。该标题扫描得到相关和无关的物体的反思,您需要从中拾取并表达特定的东西,或者在这种情况下,采取并表达需要测量重要迹象。确定患者的位置后,可以使用递送光束的形成将光束聚焦,如前所述。如果患者不在视觉轴上,则可以激活梁控制。此功能由6位配置的相位变速杆实现,每个发射器的尺寸为5.625°,提供64个设置以覆盖0°至360°相移。相位变速器位于相应的电动放大器之前,并根据主梁的焦点位置为每个递送通道分别编程,请参见图3。相位变速器通常基于使用数字到ANALOG转换器的向量调制器的模拟结构基于信号前信号的矢量调制器的模拟结构。图3在运输阶段中包含许多主题时包含的phaseShifter在雷达传感器的不同方位角时,您可以在框架到框架中实时编程phaseshifter(通常LY 100ms至200ms)或更低(使用子帧时)。例如,可以根据一个步骤20°的子帧在-60°至+60°的范围内扫描梁,如图4所示,完整的扫描小于200ms。它有助于在所有角度和光线上看到许多主题的重要迹象。图4通过20°校准将每个子帧的梁方向盘角度更改为保持电压和温度变化时保持,Ti毫米波雷达设备支持RF初始化阶段(呼叫RFINIT()rfinit()应用程序编程接口)并启动时间启用实现周期)。图5显示了校准类型类型的示例,其中可能包括以下类型:●模拟相锁环校准。 ●合成器VCO。 ●分布的局部振荡分布。 ●ADC DC偏移电压。 ●如果具有高通和低通截止频率的放大器。 ●峰值探测器。 ●发送和接收收益。 ●四边形当前不匹配。 ●发送相移嗯。图5功能线性调制脉冲的时序,监视和校准图6描述了RF前面的某些积分,以传输运输和接收前端的模拟参数。结合PA输出和LNA输入的功率检测器,伴随着循环路径,可以监视和付费前部的整个末端。图6 IWR6843的一般诊断和监视功能结论Ti毫米波设备包含FMCW雷达所需的高度集成功能,这可能是整个前端的时间,具有外部40MHz晶体。此类产品可以在三个维度上检测微地倍数的细微运动,包括检测人类呼吸和心率。许多TX链与相位变速器的进一步集成提供了光束成型和光束控制的传递,从而使SNR改进到较小的视野,同时保持MIMO以进行3D传感。鳍Ally,所有模拟组件的监视和校准的集成在整个设备的生命中都提供了相同的性能。此模拟集成级别允许在家中使用无触点基本传感器的多人使用。本文源自Texas Instruments的模拟设计杂志。 《模拟设计杂志》是由德州仪器和专家的工程师仔细编写和编写的,涵盖了从基本知识到高级技术的广泛主题,从数据转换器到传感器应用程序,这些主题为新手和经验丰富的模拟用户提供了实用的信息和解决方案。
本文指出:简介人类的重要迹象通常是通过依靠与患者身体有线连接的历史监测系统来衡量的,以通过心电图和氧气饱和传感器的结合来报告心率和呼吸率。这些传感器很难与新生儿,严重烧伤,癫痫患者或精神病患者保持不断接触。对于那些自由移动的人,当他们搬到家中时,监视重要的迹象可能并不容易。雷达波(mmwave)传感器也可以检测到非常微妙的运动,即使患者的胸部增加。由于胸部运动受呼吸(初级频率)和心率运动(过度)的影响,因此胸部运动的精细测量可以实现生命体征的接触测量。导致此功能的主要贡献是传感器通过频率调节连续波的结合来检测患者的胸部和速度的能力(FMCW)发现和多输入多输出(MIMO)天线雷达系统。传感器还可以看到床上的运动,并为潜在的卧床提供护理人员,并且还可以同时监测许多患者,例如几个成年人。此外,毫米波传感器可以看到一个人的跌倒,并让看护人实时。集成的重要线性FM脉冲坡道线性度是确保FMCW系统中准确和经常测量的参数之一。将整个模拟链的整合到OneThe OneThe Minolithic Microwave整合电路中不仅减少了设计和设计之间的差异,而且还有助于改善整体 - 序列 - 测量,因为可以在衰老和温度的发生率下进行有效的监测和校准。查看图1中Texas Instruments(TI)IWR6843的框图,您可以看到“发射器接收器”部分中唯一的外部元素是标准的40MHz晶体。另外to此外部40MHz晶体,IWR6843还提供了发射机/收件人的完整集成:●坡道生成器。 ●小数的相锁环。 ●20GHz电压控制的振荡器(VCO)可以与许多前端同步,并实施相互关联的采样,以显着从外部(或从外部监狱中选择)饲养的更大的虚拟天线。 IWR6843还包含用于发射器和接收器的完整射频链(RF),包括:●软件可编程功率放大器,可在根据环境和RF法规调整链路预算时,允许多脚本传输强度,以提高灵活性。 ●用于光束控制的动态可编程相变。 ●低噪声放大器使用电源放大器编程时,可以安排链接预算。 ●可以通过发送和接收线性调制脉冲来生成中间频率(IF)的混合器。 ●如果模拟过滤器。 ●模数转换器(AD)c)采样频率高达25MHz。图1 IWR6843阻止了在芯片上MMIC系统中包含完整的RF链的图可以达到性能安全性所需的诊断能力水平。完整的数字信号链处理16位范围,多普勒或快速傅立叶变换(FFT)和信号处理中持续的不正确警报率(CFAR)。 ●600MHz完全编程的数字信号处理器,可以实现完全可自定义的信号处理。 ●完整的可编程200MHzARM®Cortex®-R4F微控制器用于聚类,监视和应用程序级代码。除了集成模具级别外,IWR6843 IWR6843AOP模型还包括包装中的天线,该天线允许进一步集成并减少印刷电路板(PCB)区域,以在空间或RF信号强迫的应用程序中具有挑战性情况。 FMCWFMCW提供了一种非常简单的调制方法,可提供广泛的范围和高精度测量距离时。 FMCW还提供了平均打孔器,并提供了径向尺寸的速度(雷达和目标之间的界限),这可能是高速(例如汽车速度)或低速(例如呼吸时胸部的胸部速度)。监测此类轻度作用通常称为多普勒检测或Microdoppler检测。线性FM脉冲线性FM脉冲描述了FMCW中使用的调制。随着时间的推移,即时频率F(T)随着时间的推移而变化,因此它是FM的线性脉冲。差异 - 发送线性调制脉冲和接收线性调制脉冲之间的频率与飞行时间成正比(达到目标和返回的时间),因此与到达目标的距离成正比。公式1表示广泛的交付为:其中k是交付时间交付频率的斜率(对于IWR6843,此数量可以是0MHz/µs和250MHz/µs之间的任何值,幅度(变速箱功率)信号的),F0是最低的频率(根据所选的VCO为57GHz或60GHz)。公式2表示接收的幅度为:其中,对于δ=(2×d) /v(飞行时间的两倍),d到目标的距离,v是介质中光传播的速度。混合器乘以发送信号和接收信号之间的频率差(公式3):根据三角函数的基本规则,混合器的输出是两个故障的总和:电影的频率是f_tx和f_rx之间的差异,另一个电影的总和是两个。混合器的输出通过低通滤波器恢复,其频率是发射器和接收者之间的频率差。方程4是在集成和差异的公式中,AS:混音器输出通过低通滤波器将使IF if,这是发射器和收件人之间的频率差异(因此,e量与飞行时间成正比)。方程5是结果信号:ADC是一个信号;请注意,信号频率低于线性频率调制脉冲的频率,因此很容易通过正常的ADC。例如,IWR6843中的最大ADC采样频率为25MHz。从等式5中,您可以清楚地看到用于测量呼吸频率多普勒元素的胸部运动的心率。当信号仅带有 - 点信息(YIF频率为飞行时间)时,FFT和峰值检测时,信号通过FFT的距离,然后执行CFAR或阈值算法的算法。图2显示了不同天线之间飞行的时间差。图2相增加了每个天线接收的MIMO描述,总结,到达角度来自每个接收天线测得的飞行时间。在数学级别上,等式6将每个天线的方向盘定义为:转向矢量用于将每个目标的信号与每个天线组合。公式7表示所有天线从每个目标发送的所有信号的总和,其中xi是3天线接收的信号:方程8计算基于窄的零件计算算法。 The algorithm can increase the output strength of the beamformer in connection with a particular direction to a greater extent, expressing a maximizing relationship with Equation 9 as: To calculate the P (A (θ)) of each θ, Equation 10 is approximately R As: where X is the signal matrix (Equation 11): From this formula Radar implements the position of derivation in three dimensions.光束控制沿您希望看到带有雷达传感器的捕获场景数据的方向通常需要在天线宽度提供的整个视野的每个帧周期中进行扫描。该标题扫描得到相关和无关的物体的反思,您需要从中拾取并表达特定的东西,或者在这种情况下,采取并表达需要测量重要迹象。确定患者的位置后,可以使用递送光束的形成将光束聚焦,如前所述。如果患者不在视觉轴上,则可以激活梁控制。此功能由6位配置的相位变速杆实现,每个发射器的尺寸为5.625°,提供64个设置以覆盖0°至360°相移。相位变速器位于相应的电动放大器之前,并根据主梁的焦点位置为每个递送通道分别编程,请参见图3。相位变速器通常基于使用数字到ANALOG转换器的向量调制器的模拟结构基于信号前信号的矢量调制器的模拟结构。图3在运输阶段中包含许多主题时包含的phaseShifter在雷达传感器的不同方位角时,您可以在框架到框架中实时编程phaseshifter(通常LY 100ms至200ms)或更低(使用子帧时)。例如,可以根据一个步骤20°的子帧在-60°至+60°的范围内扫描梁,如图4所示,完整的扫描小于200ms。它有助于在所有角度和光线上看到许多主题的重要迹象。图4通过20°校准将每个子帧的梁方向盘角度更改为保持电压和温度变化时保持,Ti毫米波雷达设备支持RF初始化阶段(呼叫RFINIT()rfinit()应用程序编程接口)并启动时间启用实现周期)。图5显示了校准类型类型的示例,其中可能包括以下类型:●模拟相锁环校准。 ●合成器VCO。 ●分布的局部振荡分布。 ●ADC DC偏移电压。 ●如果具有高通和低通截止频率的放大器。 ●峰值探测器。 ●发送和接收收益。 ●四边形当前不匹配。 ●发送相移嗯。图5功能线性调制脉冲的时序,监视和校准图6描述了RF前面的某些积分,以传输运输和接收前端的模拟参数。结合PA输出和LNA输入的功率检测器,伴随着循环路径,可以监视和付费前部的整个末端。图6 IWR6843的一般诊断和监视功能结论Ti毫米波设备包含FMCW雷达所需的高度集成功能,这可能是整个前端的时间,具有外部40MHz晶体。此类产品可以在三个维度上检测微地倍数的细微运动,包括检测人类呼吸和心率。许多TX链与相位变速器的进一步集成提供了光束成型和光束控制的传递,从而使SNR改进到较小的视野,同时保持MIMO以进行3D传感。鳍Ally,所有模拟组件的监视和校准的集成在整个设备的生命中都提供了相同的性能。此模拟集成级别允许在家中使用无触点基本传感器的多人使用。本文源自Texas Instruments的模拟设计杂志。 《模拟设计杂志》是由德州仪器和专家的工程师仔细编写和编写的,涵盖了从基本知识到高级技术的广泛主题,从数据转换器到传感器应用程序,这些主题为新手和经验丰富的模拟用户提供了实用的信息和解决方案。
上一篇:如何选择2000 MB/S移动固态驱动器?建议使用这6个
下一篇:没有了